 FARO フォトポイント
FARO フォトポイント
FAROFotoPointsを使用して、ドローン、一眼レフカメラ、または電話のカメラから一連の写真を点群に変換し、FARO Zone 3Dで使用できます。
点群に変換する写真の撮影方法については、「 FotoPoints ガイドラインとヒント」を参照してください。
動画から点群を作成することもできます。ビデオから点群を作成するを参照してください。
一連の写真を点群に変換するには:
-
点群リボンから、FARO FotoPoints Importを選択します。
-
[入力フォルダー] から、画像が含まれているフォルダーを選択します。
-
[出力フォルダ]から、.lsproj(点群)ファイルの保存先フォルダを選択します。
-
[品質] 設定を選択します。品質設定を最も低くすると、処理は高速になりますが、点群の品質は低くなります。「低」設定は、写真セット内のすべての写真を点群に変換できるようにする場合に便利です。[高] に設定すると、処理時間が長くなります。「高」の設定は、写真の数によっては数時間かかる場合があります。
-
次の スケールオプションから選択します。
-
[ スケーリングに GPS データを使用] または [手動スケーリング] を選択した場合は、[ 変換 ] をクリックして操作を開始します。他のスケールオプションのいずれかを選択した場合は、それについて説明するセクションを参照してください。
| スケールに GPS データを使用 | 場合によっては、ドローンの写真にGPSデータが含まれています。画像に GPS データが含まれている場合は、このスケーリング設定が推奨されます。 |
| スケールバーを使用してスケーリング | スケールバーを使用して、既知の寸法を持つパーツを識別します。複数の画像で設定値を持つパーツを特定する必要があります。スケールバーを使用してオブジェクトのサイズを変更するを参照してください。 |
| GCP 使用 | 地上基準点 (GCP) がドローン画像で使用可能な場合は、それらを使用します。地上基準点 (GCP)を参照してください。 |
| 手動スケール | スケーリングは無視します。 |
ステータスウィンドウには変換のステータスが表示され、プレビューウィンドウには取得した画像が表示されます。画像ファイルのパスをクリックすると、プレビューウィンドウに画像を表示できます。
お使いのコンピュータ、画像の数、画質にもよりますが、処理には数分から数時間かかる場合があります。操作をキャンセルする必要がある場合は、FARO fotoPoints ダイアログボックスを閉じます。
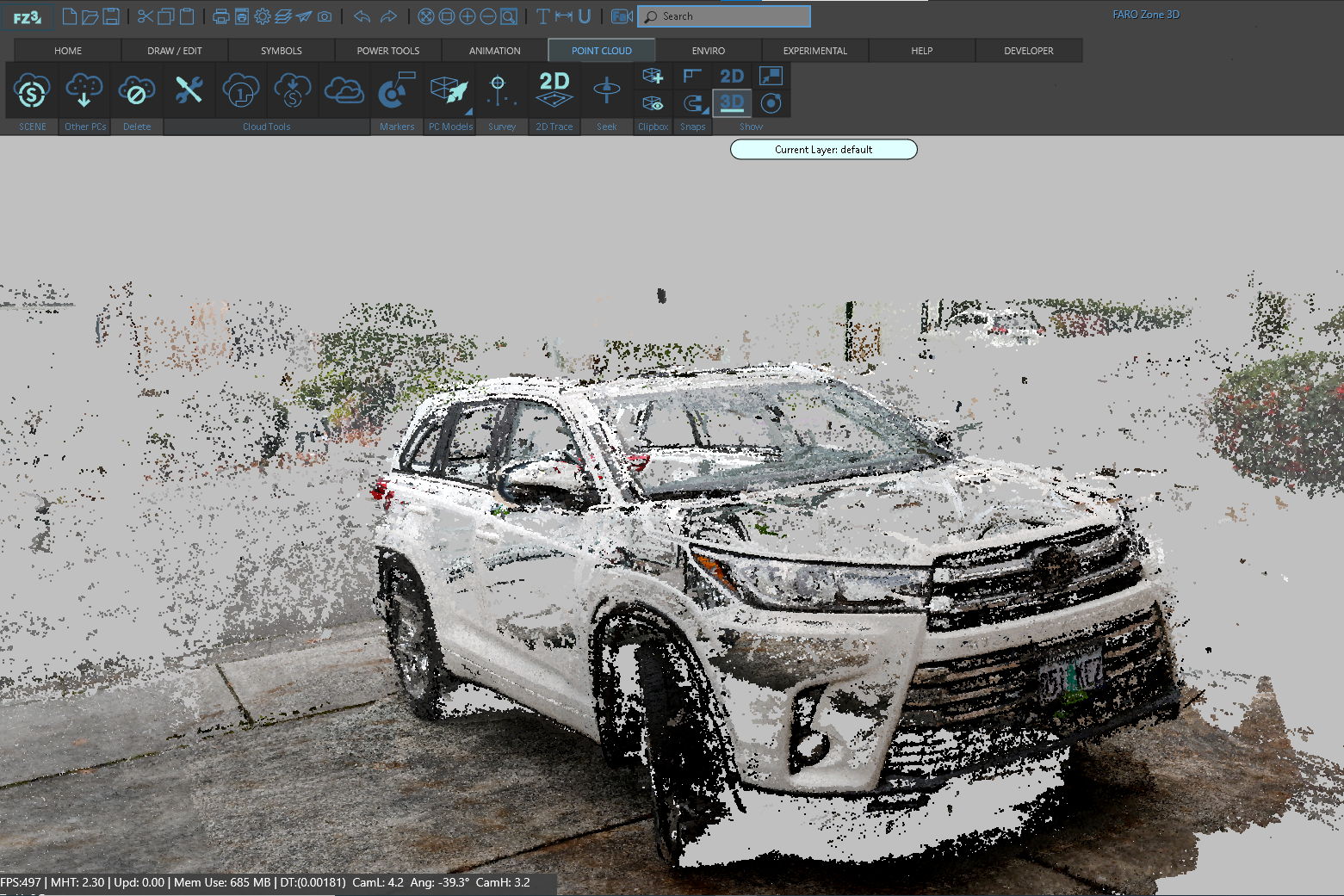
7. 操作が完了すると、点群をインポートするように求められます。[はい]をクリックして、画像から作成された点群を開きます。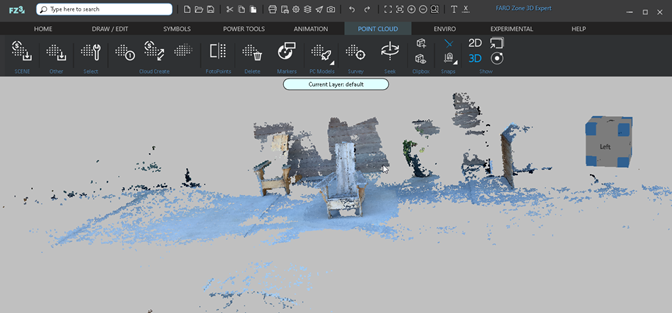
ログファイルは Images フォルダに作成されます。ログファイルを開いて、セット内の画像の結果を表示します。ログファイルにはポイント数が表示され、正しく変換されなかった写真が一覧表示されます。
スケールバーを使用してオブジェクトのサイズを変更する
結果の点群を正しくスケールするには、複数のイメージに表示される既知の寸法を持つ図面内の領域にスケールバーを適用できます。たとえば、定規、画像の 2 つの部分間の幅、またはその他の形式の距離マーカーを使用できます。
スケールバーを使用するには:
-
FotoPoints ツールでプロジェクトを設定する場合は、[スケール オプション] ドロップダウンから [スケール バーをスケーリングに使用] を選択します。
-
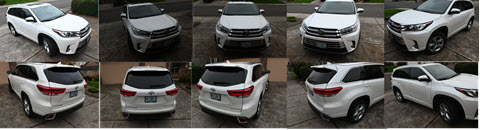
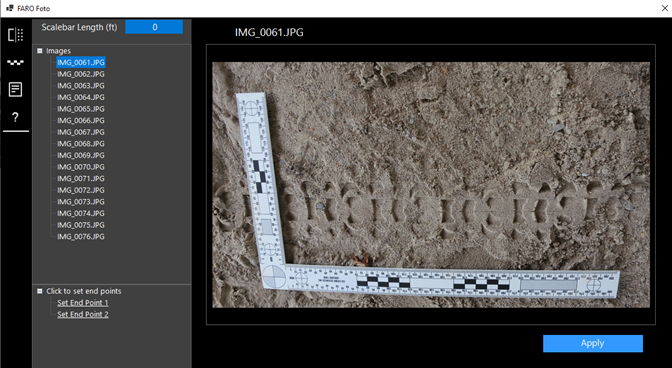
「Scalebar」ダイアログで、スケールバーの長さを入力します。これは、写真内のオブジェクトの既知の寸法です。たとえば、車の画像から点群を作成する場合は、ボンネットの長さの正確な測定値を指定できます。ドロップダウンから測定単位を選択します。
-
測定に使用するオブジェクトの明確なビューを示す画像を選択します。
- [ 終点 1 を設定 ] をクリックし、画像の最初の終点を設定します。マウスホイールを使用してズームインし、マウスの右ボタンでパンします。終点が設定されると、終点マークが表示されます。別の位置を選択する必要がある場合は、[ Set End Point 1 ] を再度クリックします。
- [ 終点 2 を設定 ] をクリックして、2 番目の終点を設定します。2 番目の端点が同じ画像内にある必要はないため、端点 2 の見やすい別の画像を選択できます。
-
各画像の複数の角度から端点を表示して、正確な配置を確保します。
-
画像内の明確に識別可能な領域(オブジェクトの端、角、点など)に終点を設定します。
-
周囲の領域の色や明るさとコントラストが高い領域に端点を適用します。反射しない領域を選択します:反射性、完全に白、非常に暗い。
-
スケールバーの長さが正しいことを確認します。
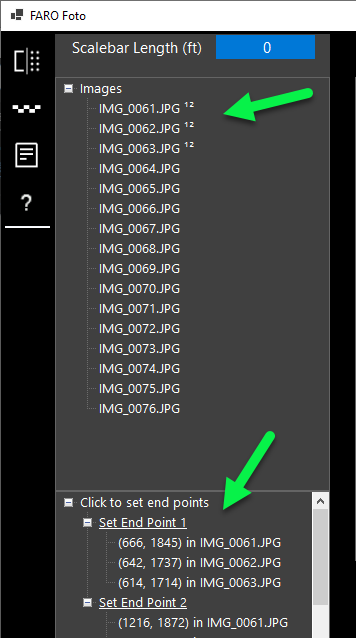
- さらに画像を選択します(少なくとも2枚の画像)。画像を選択すると、リスト内の画像に、設定したエンドポイントの上付き文字が表示されます。設定ポイントの座標は左下に表示されます。
- 少なくとも 2 つの画像に終点を設定したら、「 適用」をクリックします。これにより、[ 変換 ] ページに戻ります。
- イメージを図面にインポートするように求められます。

次に、エンドポイントを設定するためのヒントをいくつか示します。
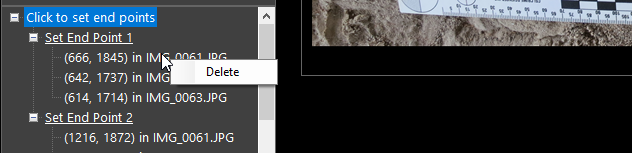
ポイントを削除する必要がある場合は、ドロップダウンでポイントを選択するか、ポイントを右クリックして [削除] を選択します。
FotoPointsワークフローを確認して、点群を完成させるために従うことができる他の手順を確認します。FAROFotoPointsサンプルプロジェクト
地上基準点 (GCP)
地上コントロール ポイント (GCP) は、地上に配置され、ドローン画像とともに取得される既知の座標を持つ参照マーカーです。GCPは、ドローンによって収集された航空画像の精度を向上させることができます。

ドローンは、次の目的で GCP を使用できます。
-
キャリブレーション:GCPを使用すると、ドローンのカメラをキャリブレーションして、画像の向きとスケーリングが正しいことを確認します。
-
正確な位置合わせ: GCP を使用すると、ドローン画像を現実世界の座標と正確に位置合わせできます (ジオコンファレンス)。リアルタイム キネマティクス (RTK) GPS 座標を使用すると、最適な結果が得られます。
-
画像のタイリング: 複数のドローン画像から大きな画像を作成する場合、GCP を使用すると、画像が正確にタイリングされます。
ドローンオペレーターは、ドローンの飛行前にGCPを現場に配置し、通常はGPS受信機またはトータルステーションを使用して正確な座標を記録します。飛行中、ドローンは対象地域の航空写真を撮影し、これらの画像を FotoPoints と併用してデータの精度を向上させることができます。
GCP を使用するには:
-
FotoPoints ウィンドウで [GCP] をクリックします。
-
次のいずれかを行ってください。
-
GCP データをインポートするには、 テキストファイルからのGCPデータのインポートを参照してください。
- データを手動で入力するには、グラウンド コントロール ポイントの座標を含むテキスト ファイルを開き、設定するマーカーのデータを見つけます。
-
-
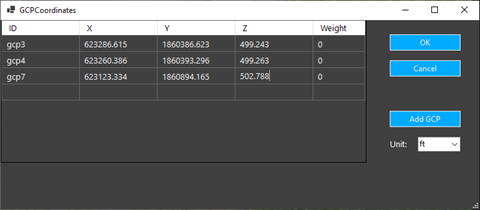
[GCP 座標] の横にある Enter をクリックし、テキスト ファイルから GCP ポイントを入力します。GCP マーカー名と一致するように ID の名前を変更できます。テキストファイルから座標をコピー/ペーストできます。[ GCP の追加 ] をクリックして、GCP を追加します。必要に応じて、ユニットタイプを変更します。
-
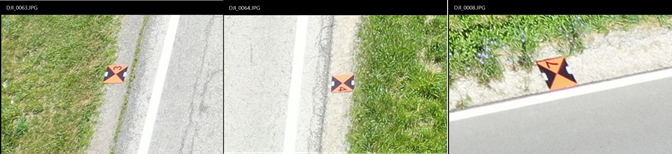
GCPマーカーがはっきりと表示されている 3+ の画像を見つけます。マウスホイールを使用して、画像をズームイン/ズームアウトします。イメージ ファイル名をメモします。
-
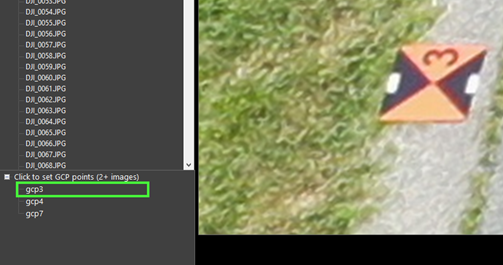
GCP マーカーを含む最初の画像を選択し、GCP エントリをクリックします。
-
十字線を図面内のマーカーに合わせ、クリックして設定します。
-
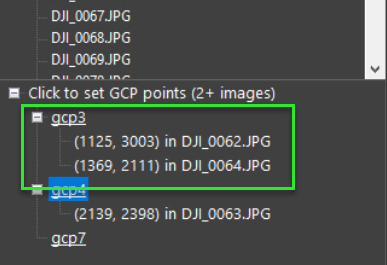
マーカーを含む別の写真を見つけて、このプロセスを繰り返します。マーカーGCPを設定した写真は、GCPエントリの下に表示されます。
-
他のマーカーについてもこのプロセスを繰り返します。この操作は、少なくとも 3 つの GCP エントリに対して行う必要があります。
-
[適用] をクリックします。
-
[
Convert Images]パネルに戻り、[Convert]をクリックして点群を作成します。

テキストファイルからのGCPデータのインポート
テキスト ファイルから GCP データをインポートして、 GCP マネージャーのフィールドにすばやく入力します。
GCP データをインポートするには:
1. FotoPointsウィンドウで、「 GCP」をクリックします。
2. [GCP Manager] をクリックします。
2. 「GCPのインポート」をクリックします。「座標データテーブル」が表示されます。
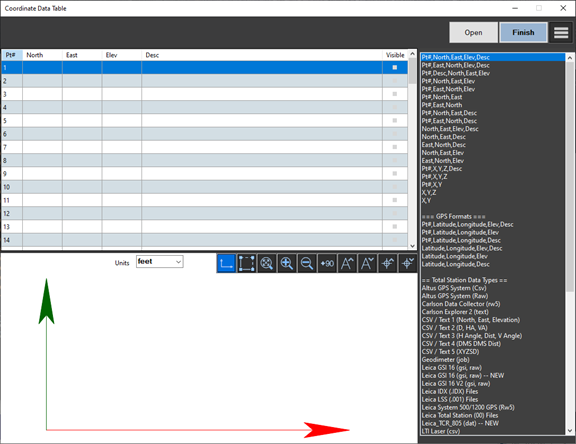
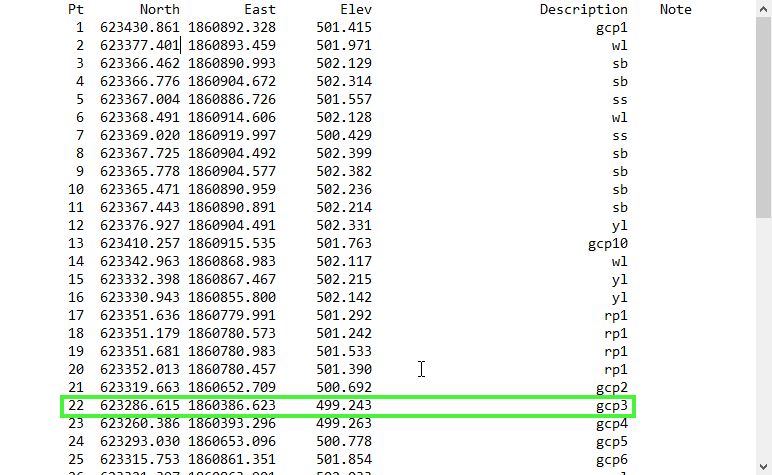
3. 右側の列から、GCPファイルの適切な形式を選択します。
次の例の適切な形式は Pt#,North,East,Elev,Desc です。

4. 「 開く」をクリックし、GCP 設定テキストファイルを参照して開きます。
5. 含めるGCPのチェックボックスをオンにします。
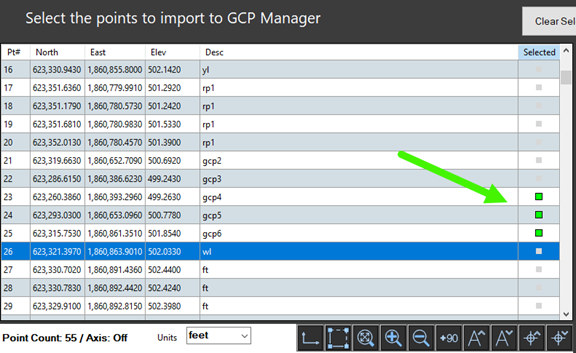
6. 「完了」をクリックします。GCP マネージャーには、テキスト ファイルの GCP ポイントが入力されます。
7. [OK]をクリックします。
8. GCPマーカーを含む画像を選択し、GCPエントリを選択します。

{kind=link}